Edutainment Robots
Completed projects

DownloadInsBot (PDF, 567 KB) - The Cockroach Robot Interacting with Cockroaches
An Autonomous Wheeled Climbing Robot with Tactile Wheels





Motivation
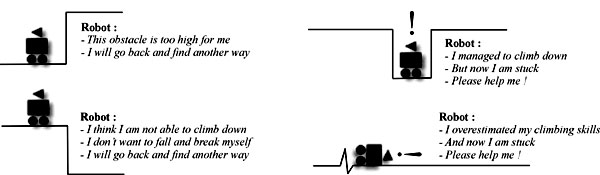
The function of a mobile robot is to move from place to place autonomously, i.e. without human intervention. Building mobile robots able to deal autonomously with obstacles in rough terrain is a very complex task because the nature of the terrain isn’t known in advance and may change in time. The role of the path planner is to determine a trajectory in order to reach the destination while avoiding obstacles and without getting stuck. A true autonomous mobile off-road robot has to be able to evaluate its own ability to cross over the obstacles it may encounter.
Integration of Tactile Wheels
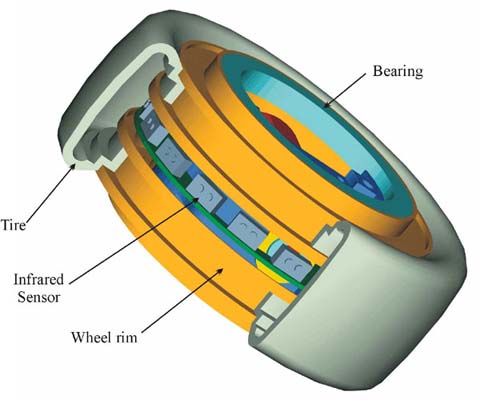
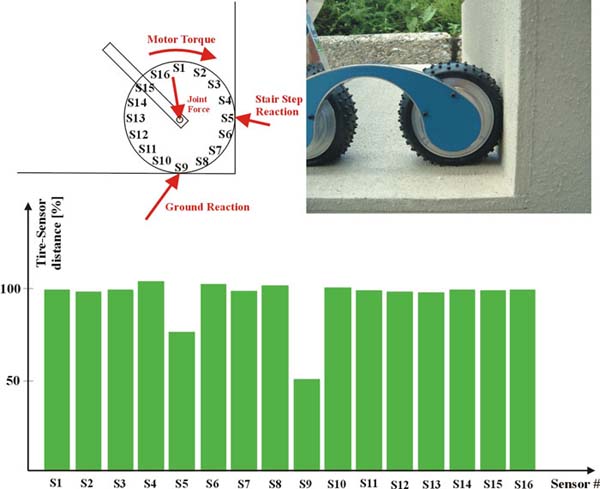
For a mobile robot that explores rough terrain, tactile sensors able to detect obstacles provide more information about obstacles; consequently, the robot can adapt its behaviour to the terrain. The idea is to have a tactile wheel that is able to detect and locate physical contact to the terrain surface on its circumference. A motorized tactile wheel was designed using 16 infrared sensors, which measure the tire deformation caused by the ground contact forces. This measurement gives the contact points an approximation of the normal contact forces acting on the wheel. The mechanical design allows the sensors to be fixed on the wheel hub. The advantage is that the sensors do not turn with the wheel rims and the tire.
Locomotion Mechanism of Octopus
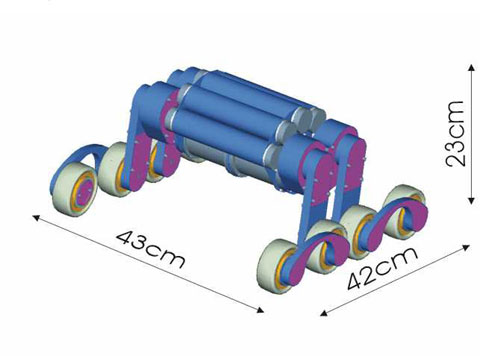
- The payload support and the two bodies on each side are linked in a passive differential configuration
- The 2 arms and the body on each side of the robot are linked in a motorized parallelogram configuration
- The forarms are linked to the arms by a motorized joint
- Each forarm has 2 «touch sensitive motorized wheels» attached to it
- Total of 8 wheels, 6 motorized articulations and 1 passive articulation ==> 15 Degrees of Freedom

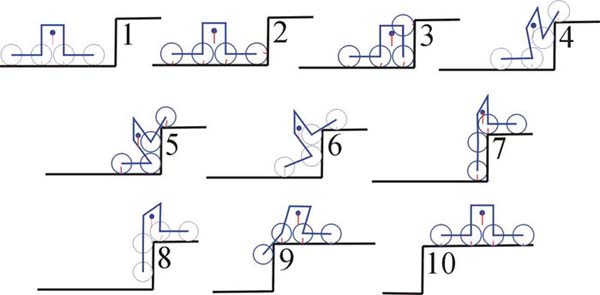
Step climbing with Octopus
- The robot is rolling in his flat terrain configuration with the centre of gravity between the central wheels.
- The front wheel touches the step.
- The front forearm raises as the robot continue its advance until the second wheel touches the step.
- The rear forearm motor and the motorized parallelogram act to raise the body, the front arm, the front forearm and the two front wheels. The front forearm motor acts so that the front wheel follows the terrain profile and reaches the horizontal part of the step.
- The robot continues its advance until the third wheel touches the step.
- At this moment the two forearm motors act to raise the body, the two arms and the two central wheels. The weight of the robot is shared between the two external wheels.
- The second wheel reaches the horizontal part of the step before the last wheel touches the vertical part of the step. The weight of the robot is shared between the two front wheels and the last wheel.
- The front forearm motor and the motorized parallelogram act to raise the body, the rear arm, the rear forearm and the rear wheels. The weight of the robot is shared between the two front wheels. We remark that the position of the COG is outside the two contact points of the front wheels. In this case some friction on the front wheels is necessary to prevent falling back.
- The third wheel reaches the horizontal part of the step. The rear forearm rises until the last wheel reaches the summit of the step.
- The climbing sequence is over.
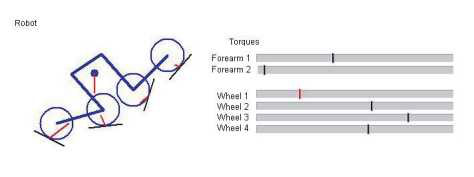
Model and Control of the Robot
A two-dimensional static model and a controller are proposed. The inputs of the controller are the contact points with ground, the geometric angles of the articulations, and the direction of the gravity field. The outputs of the controller are the torques for the wheels, the torques for the forearms, and the position set point for the body. By considering one side of the robot, there are seven degrees of freedom (torques applied to the wheels and to the forearms and the position of the body). The single equation that must be satisfied in order to achieve the equilibrium on an arbitrary ground is affine with respect to the torques. Optimisation methods are used to minimize the ratio between friction and normal contact forces for each wheel, and therefore the risk of slippage. One possible solution is such that these ratios are equal in absolute value. The resulting equation is a polynomial of order four with respect to the ratio; all coefficients are calculated explicitly from the physical parameters of the robot, its configuration, and the contact points between the wheels and the ground, which is measured. Then all torques are given by affine expressions. This low complexity enables the computation of the optimal solution in real time.
The model and the controller are validated with external pageSysQuake™, software for the design and simulation of dynamic systems.
Publications
Lauria, M., Piguet Y. and Siegwart, R. (2002) Octopus - An Autonomous Wheeled Climbing Robot. In Proceedings of the Fifth International Conference on Climbing and Walking Robots. Published by Professional Engineering Publishing Limited, Bury St Edmunds and London, UK.

