Space and Rescuing Robots
Running projects

Completed projects
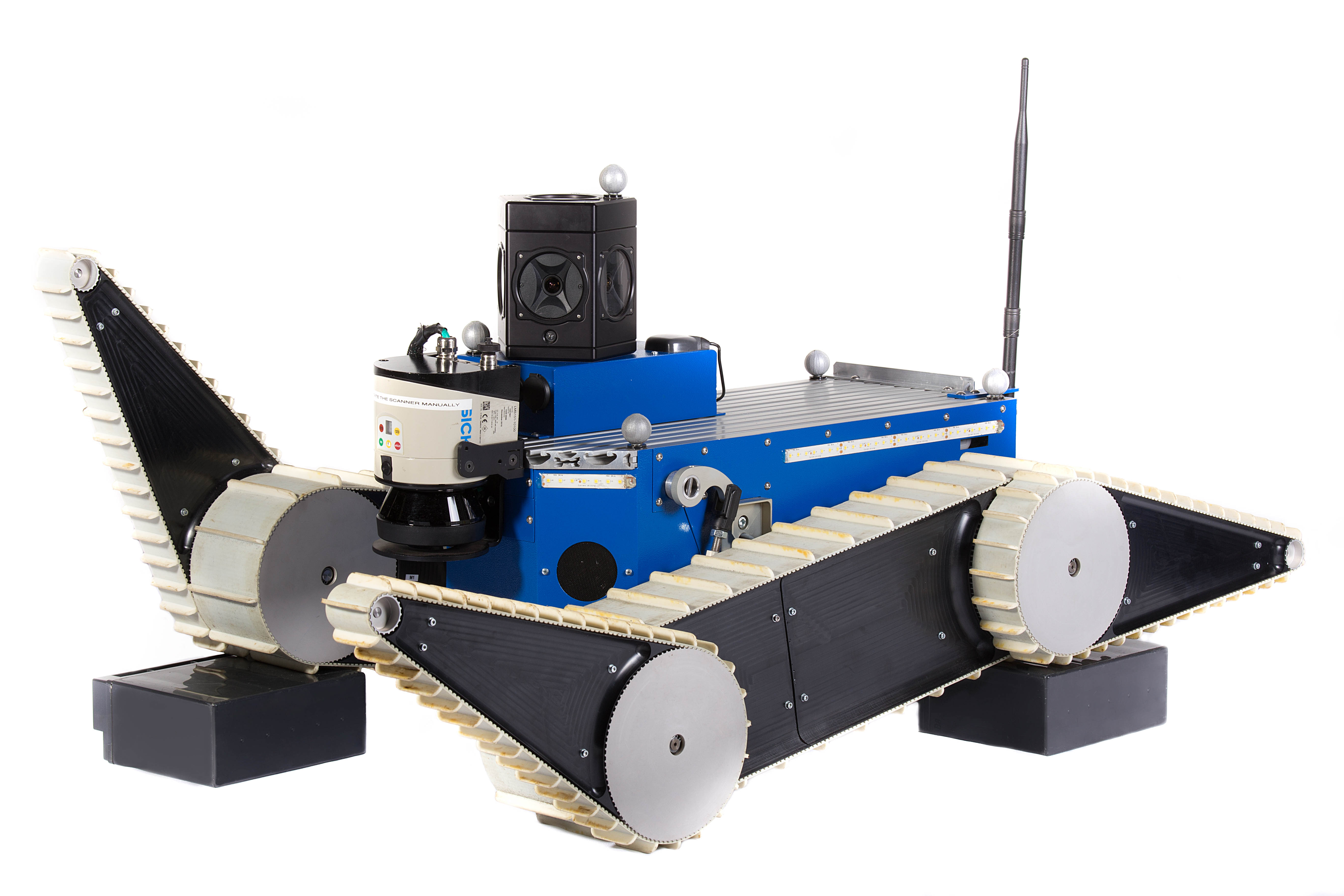
Autonomous vehicles in uneven terrain need to rely on efficient suspension mechanisms that allow negotiating obstacles of different kinds, while consuming the least energy possible to increase the time of autonomy. There is an increasing need for all-terrain robots, especially in places that are not accessible by humans or where the risk of a human mission is too high, e.g. space exploration or operations in unstructured, hazardous or polluted environment.
The ASL took part in various phases of the Exomars project and the work of its collaborators is summarized in the following sections:
Pre-study phase A
coming soon...
Pre-study phase B1
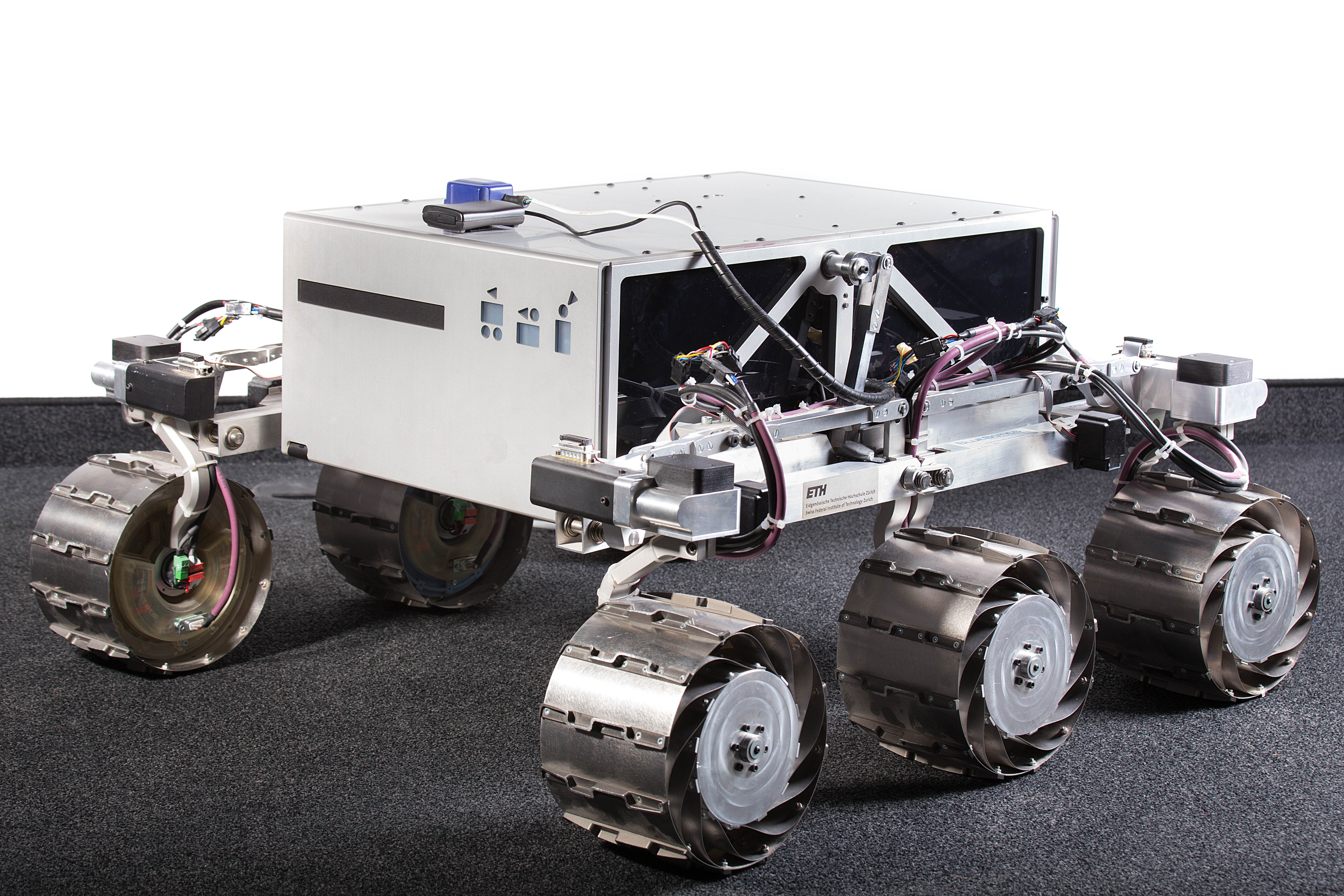
A trade-off between possible suspension mechanism candidate was conducted. It involved the RCL-C, RCL-E and the CRAB. In order to test these on an equal basis, their weight, footprint and wheels where the same. This was achieved using a modular structure. The tests were conducted on well-defined obstacle (e.g. such as the step, and so on...) which offered the equal tests conditions for all the candidates.
A summary of those results can be seen into:
- T. Thueer, A. Krebs, P. Lamon, R. Siegwart, "Performance Comparison of Rough-Terrain Robots - Simulation and Hardware", Journal of Field Robotics, 2007.
Phase B1
ASL was first responsible for implementing the low-level control algorithms of the rover BreadBoard. The software was implemented on a LEON2 microprocessor, using RTEMS.
The second activity of ASL within phase B1 was to conduct the test campaign with the BreadBoard, into the Oerlikon Space facilities. This received a quite large echo in the media, as it can be seen below.
DownloadRover Chassis Evaluation Tools (PDF, 2.4 MB)
RCET is a project funded by the European Space Agency (ESA; contract no: 18191/04/NL/PM). It aims at providing at set of software and hardware tools for performance evaluation of rough-terrain robots.