Service Robots
Running projects
external pagehttp://www.heron-h2020.eu
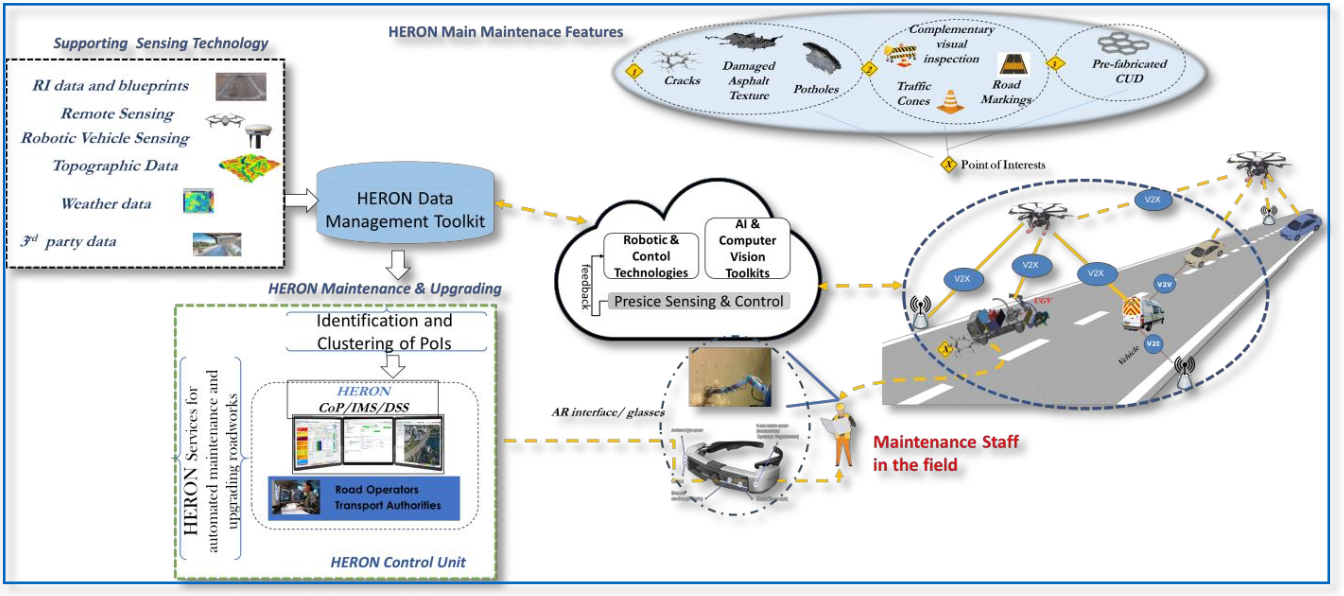
HERON aims to develop an integrated automated system to perform maintenance and upgrading roadworks, such as sealing cracks, patching potholes, asphalt rejuvenation, autonomous replacement of CUD elements and painting markings, but also supporting the pre/post-intervention phase including visual inspections and dispensing and removing traffic cones in an automated and controlled manner. The HERON system consists of: i) autonomous ground robotic vehicle that will be supported by autonomous drones to coordinate maintenance works and the pre-/post- intervention phase; ii) various robotic equipment, including sensors and actuators (e.g., tools for cut and fill, surface material placement and compaction, modular components installation, laser scanners for 3D mapping) placed on the main vehicle; iii) sensing interface installed both to the robotic platform and to the Road Infrastructures (RI) to allow improved monitoring (situational awareness) of the structural, functional and RI’s and markings’ conditions; iv) the control software that interconnects the sensing interface with the actuating robotic equipment; v) Augmented Reality (AR) visualization tools that enable the robotic system to see in detail surface defects and markings under survey; vi) Artificial Intelligence/AI-based toolkits that will act as the middleware of a twofold role for: a) optimally coordinating the road maintenance/upgrading workflows and b) intelligent processing of distributed data coming from the vehicle and the infrastructure sensors for safe operations and not disruption of other routine operations or traffic flows; and vii) integrate all data in an enhanced visualisation user interface supporting decisions and viii) communication modules to allow for Vehicle-to-Infrastructure/-Everything (V2I/X) data exchange for predictive maintenance and increase users safety. HERON aims to reduce fatal accidents, maintenance costs, traffic disruptions, thus increasing the network capacity and efficiency.
external pagehttps://harmony-eu.org
Harmony will enable robust, flexible and safe autonomous mobile manipulation robots for use in human-centred environments by making fundamental contributions in cognitive mechatronic technologies. Our targeted application area is assistive healthcare robotics, which is motivated by the mounting pressure on our healthcare system due to factors such as Europe's ageing population. While this presents an immense challenge for the healthcare industry, it is also an opportunity to proactively meet these challenges. Our current robotic automation solutions only offer “islands of automation” where either mobility or manipulation is dealt with in isolation.
Harmony aims to fill this gap in knowledge on combining both robotic mobility and manipulation modalities in complex, human-centred environments. Harmony considers two use cases identified by our end user partners:
- the automation of just-in-time delivery tasks; and
- the automation of hospital bioassay sample flow.
These use cases highlight existing processes that require fast, reliable and flexible automation to undertake the dull and repetitive tasks that are currently conducted by over-qualified staff. Critically, these tasks require robots that can interact with the world across a wide operational spectrum, from the (sub)millimetre precision required for fine manipulation to navigating across building- and campus-scale spaces. This motivates a holistic representation of the environment that facilitates the tight integration of socially aware planning, perception and control, and allows cognitive elements such as learning, reasoning and adaptation of actions for natural interaction.
Harmony gathers the required expertise to tackle these core scientific and engineering challenges. Through demonstrators and open software modules, Harmony will show that robotic mobile manipulation systems can integrate seamlessly into our existing processes and spaces to meet growing needs in the healthcare industry and beyond.
external pageSafe Navigation of Robots in Dense Human Crowds
CrowdBot - Safe Navigation of Robots in Dense Human Crowds is a project funded by the European Commission within Horizon2020 and will enable mobile robots to navigate autonomously and assist humans in crowded areas. Today’s robots are programmed to stop when a human, or any obstacle is too close, to avoid coming into contact while moving. This prevents robots from entering densely frequented areas and performing effectively in these high dynamic environments. CrowdBot aims to fill in the gap in knowledge on close interactions between robots and humans during navigation tasks.
Completed projects
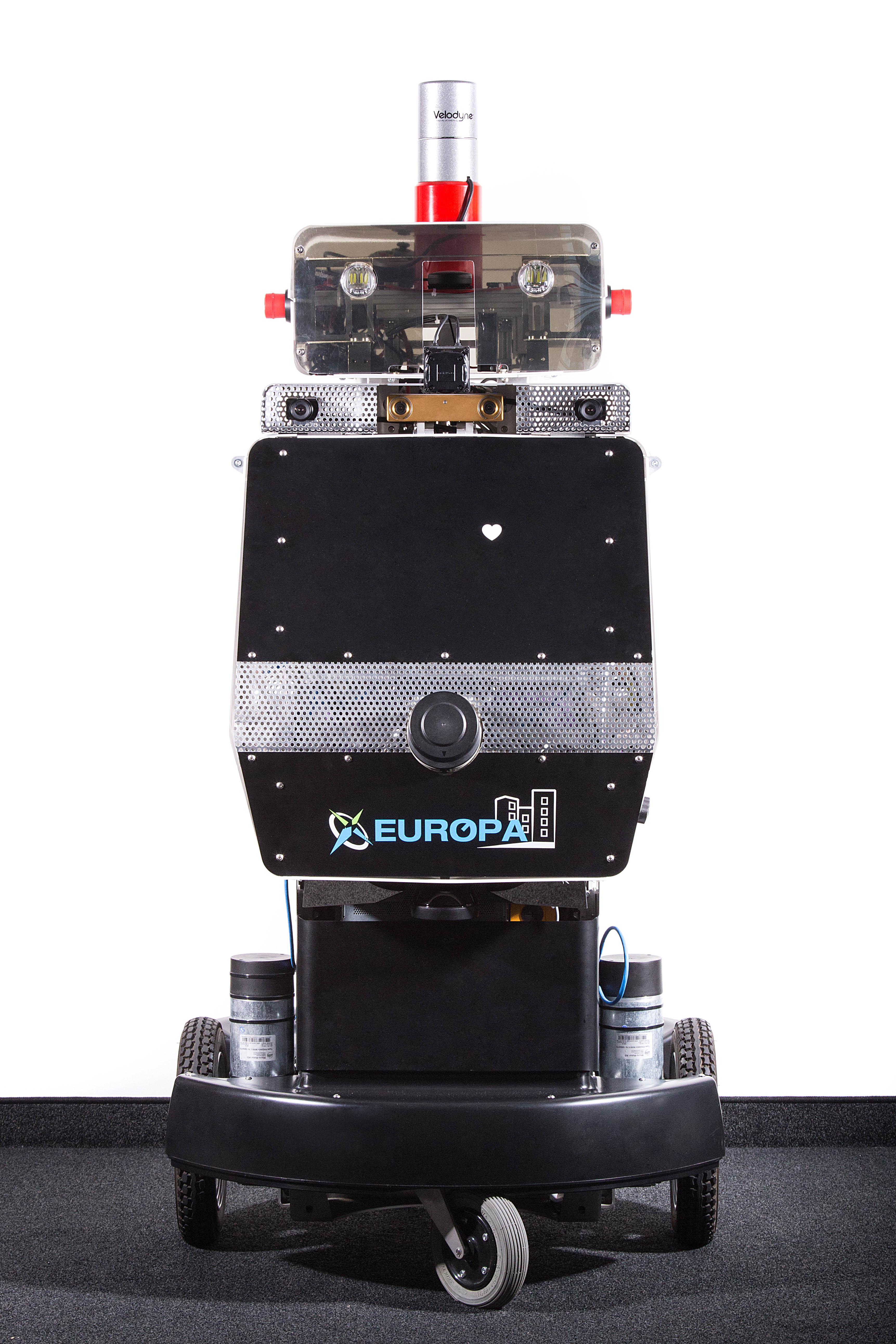
external pageEuropean Robotic Pedestrian Assistant 2.0
EUROPA2 - European Robotic Pedestrian Assistant 2.0 is a project funded by the European Commission within FP7. The goal of the EUROPA2 project is to develop the foundations for service robots designed to autonomously navigate in urban environments to provide various services to users including guidance, delivery, and transportation.
Bayesian Approach to Cognitive Systems

Contemporary robots and other cognitive artifacts are not yet ready to autonomously operate in complex real world environments. One of the major reasons for this failure in creating cognitive situated systems is the difficulty in the handling of incomplete knowledge and uncertainty.
By taking up inspiration from the brains of mammals, including humans, the BACS project will investigate and apply Bayesian models and approaches in order to develop artificial cognitive systems that can carry out complex tasks in real world environments. The Bayesian approach will be used to model different levels of brain function within a coherent framework, from neural functions up to complex behaviors. The Bayesian models will be validated and adapted as necessary according to neuro-physiological data from rats and humans and through psychophysical experiments on humans. The Bayesian approach will also be used to develop four artificial cognitive systems concerned with (i) autonomous navigation, (ii) multi-modal perception and reconstruction of the environment, (iii) semantic facial motion tracking, and (iv) human body motion recognition and behavior analysis. The conducted research shall result in a consistent Bayesian framework offering enhanced tools for probabilistic reasoning in complex real world situations. The performance will be demonstrated through its applications to driver assistant systems and 3D mapping, both very complex real world tasks.
Description of the project
The overall objectives of this project are to study the perceptual, representational, reasoning and learning capabilities of embodied robots in human centered environments. The project develops methods and technologies for the construction of such cognitive robots, able to evolve and grow their capacities in close interaction with humans in an open-ended fashion.
Expected results are basic methods, algorithms and architectures and their integration and long-term experimentation and scientific evaluation on embodied robotic systems in different settings and situations.
In the focus of this research endeavor, is the development of a robot whose ultimate task is to serve humans as a companion in their daily life. The robot is not only considered as a ready-made device but as an artificial creature, which improves its capabilities in a continuous process of acquiring new knowledge and skills.
Besides the necessary functions for sensing, moving and acting, such a robot will exhibit the cognitive capacities enabling it to focus its attention, to understand the spatial and dynamic structure of its environment and to interact with it, to exhibit a social behavior and communicate with other agents and with humans at the appropriate level of abstraction according to context.
The design of the cognitive functions of this artificial creature and the study and development of the continuous learning, training and education process in the course of which it will mature to a true companion, are the central research themes of the project.
Research Area within project (Spatial Cognition and Multimodal Situational Awareness)
To address the understanding of how an embodied system can come to a conceptualization of sensory-motor data, generate plans and actions to navigate and manipulate in typical home settings. The concept formation is considered in a broad sense, i.e. the ability to interpret situations, i.e. states of the environment and relationships between components of the environment that are static or evolving over time. The robot can observe these states or be part of the evolving action itself.
The robot will use different sensing modalities, and can also act in order to improve its understanding of the situation or to disambiguate its interpretation.
The following questions will be studied within the framework
the representation of space
the representation of situations
the representation and recognition of objects
dynamics and actions
Please see the Downloadproject poster (PDF, 272 KB) for more details. The Downloadabstract (PDF, 39 KB) of my thesis should provide a quick overview of the entire work. You can also find more details in a thesis summary presentation that I have made online Downloadhere (PDF, 1.4 MB). Finally, the papers below have the most detailed presentation of the ideas.
Software
- Object Recognition Toolkit based on SIFT (Davide Lowe)
- SIFT object recognition software including GUI for ease of use
- Released under General Public License (GPL)
- Reference Publication : Ramisa, Vasudevan et al @ ICVS 2008
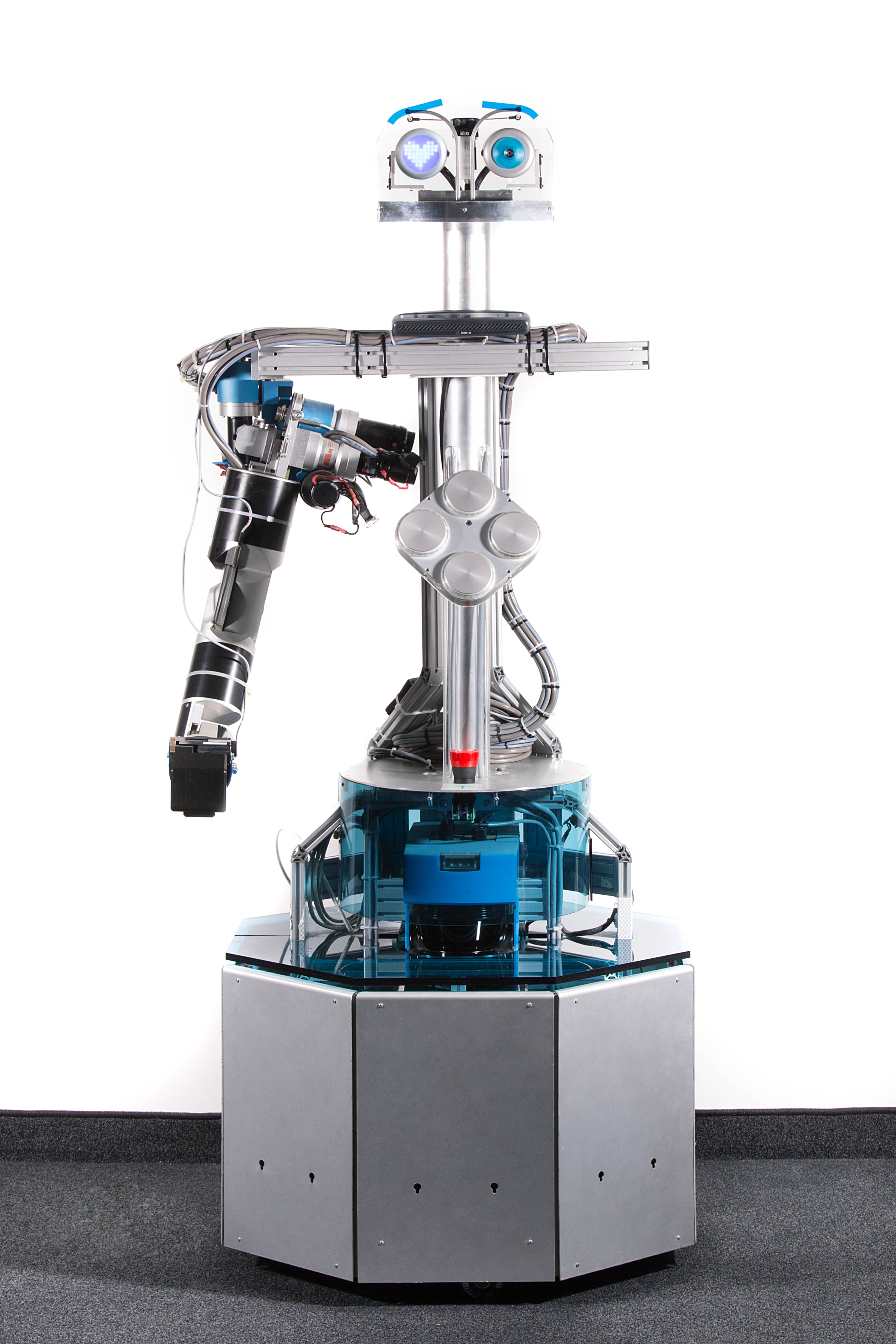
external pageEuropean Robotic Pedestrian Assistant
DownloadProject poster (PDF, 1.2 MB)
EUROPA - European Robotic Pedestrian Assistant is a project funded by the European Commission within FP7. The goal of the EUROPA project is to develop the foundations for service robots designed to autonomously navigate in urban environments outdoors as well as in shopping malls and shops to provide various services to users including guidance, delivery, and transportation.
Goals
In the field of robotics, there has recently been a tremendous progress in the development of autonomous robots that offer various services to their users. Typical services include support of elderly people, cleaning, transportation and delivery tasks, exploration of inaccessible hazardous environments, or surveillance. Most of the systems developed so far, however, are restricted to indoor scenarios, non-urban outdoor environments, or road usage with cars. There is serious lack of capabilities of mobile robots to navigate safely in highly populated outdoor environments. This ability, however, is a key competence for a series of robotic applications.
The goal of the EUROPA project is to bridge this gap and to develop the foundations for service robots designed to autonomously navigate in urban environments outdoors as well as in shopping malls and shops to provide various services to users including guidance, delivery, and transportation. EUROPA will develop and apply sophisticated probabilistic scene interpretation techniques to deal with the unpredictable and changing environments. Based on data gathered with its sensors, the robot will acquire a detailed model of the environment, detect and track moving objects in the environment, adapt its navigation behavior according to the current situation, and communicate with its users in a natural way, even remotely. Key innovations of the project are made by robustly and reliable addressing the autonomous navigation problem in complex and populated environments, the ability to build appropriatespatial models, and by reasoning about them based on the verbal and natural interaction with users. EUROPA is targeted at developing novel technologies that will open new perspectives for commercial applications of service robots in the future.
To validate the concepts developed in the project, the EUROPA robot will be deployed in populated urban environments such as the downtown area of Zurich, Switzerland, to solve a series of tasks including transportation and guidance.
Consortium
external pageAlbert Ludwigs University of Freiburg - Autonomous Intelligent Systems Lab The autonomous intelligent systems (AIS) lab of the University of Freiburg is concerned with techniques for autonomous navigation, state estimation, and control in the context of mobile robotics and artificial intelligence. One of the major research areas covered by this lab is mobile robot navigation.
Eidgenössische Technische Hochschule Zurich - Autonomous Systems Lab The Autonomous Systems Lab (ASL) at the Eidgenössische Technische Hochschule Zurich ETHZ is an internationally renowned research lab in the field of autonomous robot design and navigation. It has a large experience in the design and autonomous navigation of wheeled and flying autonomous robots for different kinds of environments.
external pageKU Leuven - Center for the Processing of Speech and Images The team of KU Leuven that will work on the project is part of the Center for the Processing of Speech and Images (PSI), one of the units within the department of Electrical Engineering (ESAT). This team - VISICS (VISion for Industry, Communications, and Services) - is specialized in computer vision and its applications, and focuses on the sub-domains of 3D acquisition and modeling, as well as on object and object class recognition.
external pageUniversity of Oxford -external pageMobile Robotics & external pageComputational Linguistics Group Two groups of the University of Oxford, namely the Mobile Robotics Group (MRG) and the Computational Linguistics Group (CLG) are involved in EUROPA. The MRG has an international reputation in the area of robot navigation especially when it comes to operating in outdoor environments with well engineered vehicles and complex real-time software. Complementing the information theoretic research within MRG, the group possesses a strong culture of in-field experimental validation. The CLG at Oxford provides an environment in which postdoctoral workers and doctoral students work together on a wide variety of projects including several FP6 projects. The CLG has good connections with related groups in the university, including Robotics, Linguistics and Phonetics, as well as the nearby Sharp Research labs. Much recent work has combined traditional, knowledge-based approaches with statistical and machine learning methods.
external pageBlueBotics BlueBotics SA is a Swiss SME located in Lausanne. It is a spin-off of the Swiss Federal Institute of Technology Lausanne (EPFL) founded in 2001 with the mission to market innovative and promising mobile robotics technologies. BlueBotics's domain of expertise covers the engineering of mechatronic systems including integration, design, prototyping, and production. BlueBotics has full control over the development of the whole range of products, allowing for rapid reaction to custom requirements with competitive prices.
external pageRWTH Aachen University - Mobile Multimedia Group The Mobile Multimedia group at RWTH Aachen University has been newly founded with the goal of performing basic research and developing applications in visual object recognition and tracking from mobile devices and robotic platforms.
The Tour Guide Robot Robotics @ expo.02
They are mobile, they can find you, they can talk to you and ask you questions. They can interact with you, see you, they seem to be intelligent. They explain the exhibits to you, show you around, they can introduce you to their colleagues and to robotics researchers on site. And they are interested in what you think about them. Robotics is an exposition project for expo.02, the Swiss National Exhibition, May-October 2002.
It is the biggest project of its kind ever realized. Eleven fully autonomous personal robots will interact with hundred of thousands of visitors during six months, seven days a week, ten hours per day. Robotics is an exposition project about the decreasing distance between robotic technology and man. Industrial robots, as the pioneering and now economically successful robotics branch, is about to be followed by the next generation: personal robots.
They enter domestic and emotional domains and develop affective relations to their users. And the last, final step in this succession is also already made: Cyborg robotics, the fusion of robotic technology and the human body. Robots become biocompatible.