Code: CCM-SLAM
Centralized Collaborative Monocular SLAM for Robotic Teams
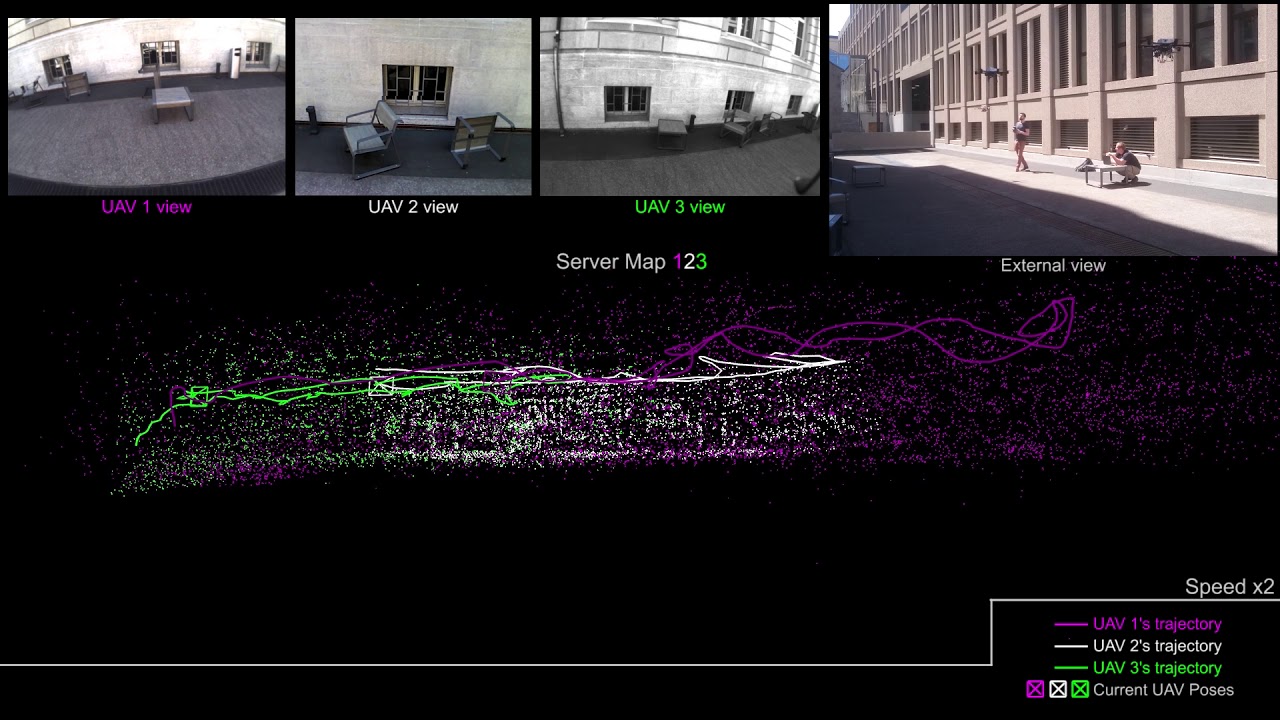
This is a centralized collaborative SLAM framework for a team of robots, each equipped with monocular camera. These robots can employ CCM-SLAM to co-localize, while building a 3D map of their surroundings in real-time, in a collaborative fashion by sharing their experiences of the environment with each other. Without any assumptions on the robots' prior constellation of poses, CCM-SLAM enables collaborative SLAM, joining any robots' maps that experience overlap and enabling sharing of information amongst them. While there is built-in tolerance to network delays, in the worst case scenario of total communication loss, the robots are still able to run monocular odometry onboard their own processors. The software for CCM-SLAM is publicly available and can be accessed from external pagethis link.
Users of this software are kindly asked to cite at least one of the following papers, where it was introduced:
Patrik Schmuck and Margarita Chli, "Multi-UAV Collaborative Monocular SLAM" in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2017. external pageDOI Research Collection
Patrik Schmuck and Margarita Chli, "CCM-SLAM: Robust and Efficient Centralized Collaborative Monocular SLAM for Robotic Teams" in Journal of Field Robotics (JFR), 2019. external pageDOI Research Collection